

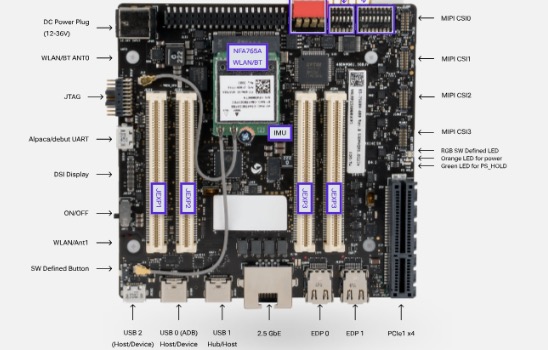
在骁龙X2 Elite平台上部署本地数据分析助手: 自动图表生成与报告输出
该文为高通嵌入式 Linux 开发实战第一篇,讲解高通开发板硬件资源与官方 BSP 两种获取途径。一是通过 QPM 工具,借助 pip 安装命令行工具,完成登录、检索、下载 IQ-9100 系列 BSP;二是依托 CodeLinaro Git,以 QRB5165 为例用 repo 拉取开源源码。同时给出 Ubuntu22.04 编译环境完整依赖安装指令,涵盖交叉编译工具、设备树编译、Yocto 构建所需组件,完整梳理高通嵌入式 Linux 前期环境搭建与源码获取实操流程。
Qualcomm 数据分析 数据挖掘 X2 Elite时间:2026-07-30 09:44:12
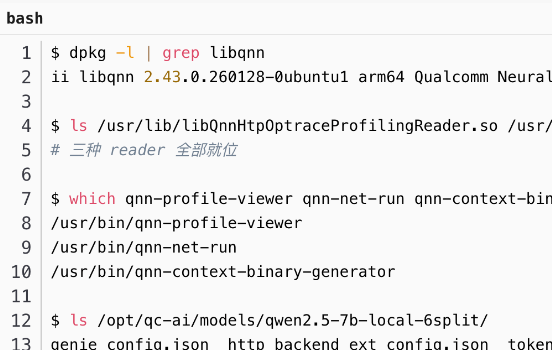
结合Optrace与QNN Profiler协同调试: 多工具交叉验证AI推理瓶颈
本文基于项目实现——Qwen2.5-7B 在 高通跃龙IQ-9075 EVK开发板上的推理调试实践,完整记录了利用 Optrace 与 QNN Profiler 进行三层交叉验证,定位 decode 阶段性能瓶颈的全过程。所有命令均在 IQ9075-EVK 上验证通过,产物归档于 artifacts/。
Qualcomm 人工智能 数据库 Optrace时间:2026-07-29 07:07:59
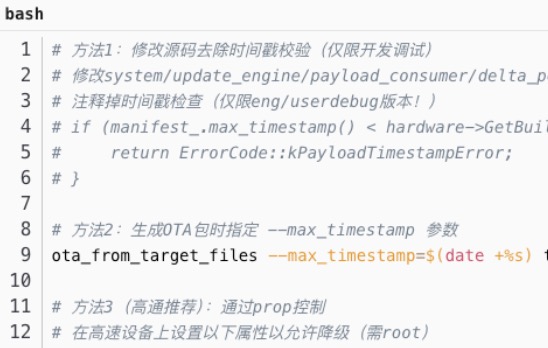
高通平台Android系统的OTA升级错误码分析(2): A/B无缝升级update_engine错误码深度剖析
本篇,将视角转向A/B无缝升级机制。我们将全面深入update_engine的世界,剖析其完整的错误码体系,并特别区分哪些是AOSP通用代码、哪些是高通真正自定义的部分。
Qualcomm android 数据仓库 OTA时间:2026-07-28 09:37:28
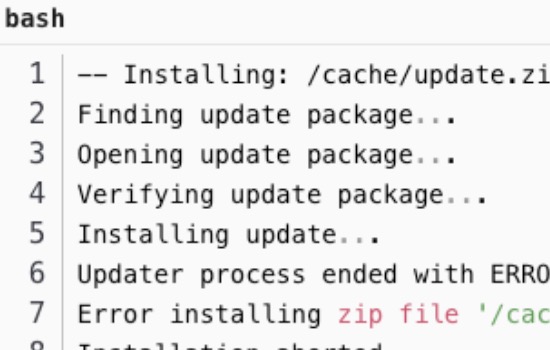
高通平台Android系统的OTA升级错误码分析(1): 解读Recovery日志中的专属报错
本文为高通 Android OTA 报错解析系列上篇,聚焦 Non-A/B 传统 Recovery 升级模式,先对比 Non-A/B 与 A/B 两种升级架构,说明日志抓取方式。完整梳理 install\_package 各类返回码,重点拆解高频 Error7 报错、签名校验失败、基带 / TrustZone 等高通专属分区校验故障,同时讲解 eMMC/UFS 存储层错误。给出日志抓取、属性查询等实操调试命令与故障速查表,文末预告下篇将剖析 A/B 升级 update\_engine 全套错误码。
Qualcomm android OTA Recovery时间:2026-07-27 15:07:03
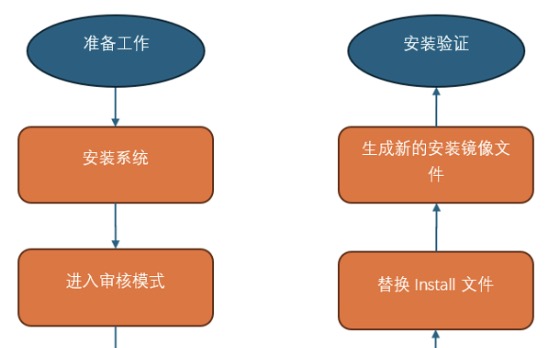
Windows系统部署系列(3):使用 Sysprep 制作集成应用程序的 Windows 安装镜像
本文详细介绍了基于 Windows on Snapdragon 的 ARM64 设备,采用 Sysprep 方法制作集成应用的定制化 Windows 11 安装镜像的完整流程。内容涵盖前置条件、审核模式配置、应用与驱动集成、系统封装、镜像捕获与拆分,以及安装验证,适用于企业级标准化部署与批量交付。
Qualcomm 骁龙 X 系列 AI PC WoS时间:2026-07-23 11:25:21

骁龙X2 Elite端侧大模型部署实战(2): 异构加速推理与流式性能极致优化
在上一篇文章中,我们深入探讨了大模型的量化压缩技术,通过INT8/INT4量化实现了模型体积的大幅缩减和推理速度的显著提升。然而,要在骁龙X2 Elite平台上实现极致的端侧大模型体验,仅靠模型侧的优化是不够的,还需要系统级的深度优化。骁龙X2 Elite Extreme(SC8480XP)拥有18核Oryon CPU、Adreno GPU和 85+ TOPS Hexagon NPU三大计算引擎。如何充分发挥异构计算的优势,实现NPU、CPU甚至GPU的协同推理,是突破单引擎性能瓶颈的关键。
Qualcomm X2 Elite 异构计算 模型部署时间:2026-07-23 09:19:36

骁龙X2 Elite端侧大模型部署实战(1): 模型量化压缩与精度无损迁移
本文详细介绍了量化的理论基础、技术选型、校准数据构建、精度验证方法,并提供了完整的QNN SDK量化实战代码。掌握这些技术,开发者可以在X2 Elite平台上高效部署高质量的端侧大模型应用
Qualcomm X2 Elite 模型量化时间:2026-07-22 09:21:39
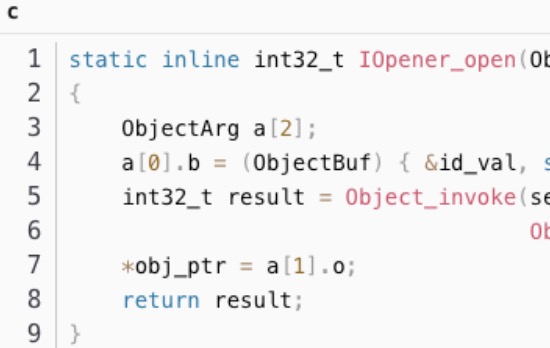
FastRPC实战(2): 与SMCInvoke的IPC机制对比
近期在做Qwen本地模型部署时,系统性地接触到FastRPC——AP用户态进程经Glink调用Hexagon CDSP上QNN/HTTP推理的那条路径。两条栈在代码形态上惊人相似(IDL、Stub/Skel、共享内存、内核驱动gatekeeper),却服务完全不同的边界;把已有TZ侧经验与新的DSP offload经验放在一起对照着学习是本文的初衷。文中涉及高通跃龙IQ-9100类设备的数据均引自本项目诊断报告与官方文档。
Qualcomm 开发语言 FastRPC SMCInvoke IPC时间:2026-07-21 09:30:17
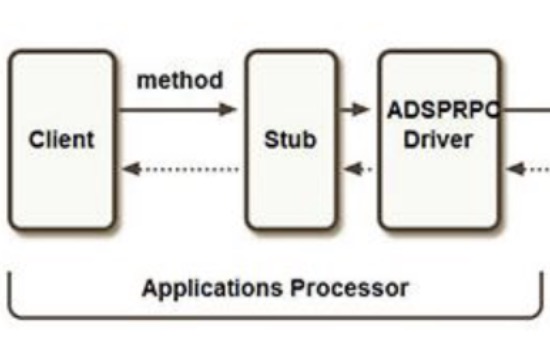
FastRPC实战(1): 将计算负载从CPU卸载到Qualcomm Hexagon DSP
在无人机、机器人和智能相机等等实时计算场景中,开发者们始终在寻找一个平衡点——既要高性能,又要低功耗。Qualcomm Hexagon DSP(数字信号处理器)提供了一个极具吸引力的解决方案,而FastRPC则是连接CPU与DSP之间的关键桥梁。
Qualcomm FastRPC Hexagon DSP时间:2026-07-20 10:32:22
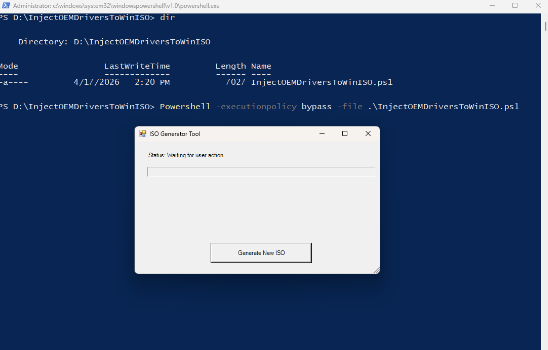
Windows 系统部署系列(2):基于 PowerShell 图形化工具的 Windows ISO OEM 驱动集成指南
本文提出一种基于 PowerShell 图形化工具的 Windows ISO 驱动集成方案,通过自动化完成映像挂载、驱动注入与 ISO 重构,解决部署过程中设备识别与兼容性问题,并提升企业级 Windows 在 OEM 及 ARM64 平台上的部署成功率。
Qualcomm 骁龙X系列 AIPC WoS时间:2026-07-17 11:41:00
高通跃龙IQ-9100平台上部署7B模型FastRPC通过IOMMU零拷贝调用DSP服务的原理
我们之前记录了7B模型在高通跃龙IQ-9100平台上的SMMU映射失败诊断和限制突破,讲的是实际工程遇到的问题和解决方法,但没有对底层概念的理解。这一篇将往下一层深入探索和理解。
Qualcomm fastRPC SMMU IOMMU时间:2026-07-16 09:27:50
Qualcomm 开发者专区是 Qualcomm 联合CSDN 共同打造的面向中国开发者的技术专区。致力于通过提供全球最新资讯和最多元的技术资源及支持,为开发者们打造全面一流的开发环境。本专区将以嵌入式、物联网、游戏开发、Qualcomm® 骁龙™处理器的软件优化等技术为核心,打造全面的开发者技术服务社区,为下一代高性能体验和设计带来更多的想法和灵感。
加入 Qualcomm 开发者专区


申请成为“Qualcomm荣誉技术大使”
“Qualcomm荣誉技术大使”是Qualcomm开发者社区对开发者用户技术能力与影响力的认证体现,该荣誉代表Qualcomm社区对用户贡献的认可与肯定。
立即申请
高通技术公司推出头戴式AR开发套件骁龙Spaces™ XR开发者平台,助力打造无缝融合现实世界和数字世界边界的沉浸式体验。
为开发者提供实现创意的工具,并将变革头戴式AR的可能性,现已面市!