Qualcomm骁龙Micro Rover IOIO PWM配置
MicroRover采用蓝牙或Android配件开发工具包,使用IOIO板作为I/O分线连接Android控制装置。本文概述了如何通过Android API编程控制机器人伺服机构。
开发人员可以使用智能手机作为Android设备连接到IOIO板。请注意,Micro Rover 机器人需要五节5号电池供电。推荐使用可充电池。
我们鼓励开发者为Micro Rover 机器人开发自己的应用。
设备所包含的IOIO软件其版本为5.04。
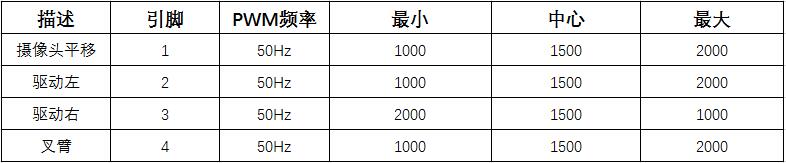
每个伺服器具有一个中心,值为1500。其最大值为2000,最小值为1000。下表定义了连线到机器人IOIO板的伺服器配置。注:右侧驱动伺服器是颠倒安装的,因此要使轮子前进,值是相反的。
设备所包含的IOIO软件其版本为5.04。
每个伺服器具有一个中心,值为1500。其最大值为2000,最小值为1000。下表定义了连线到机器人IOIO板的伺服器配置。注:右侧驱动伺服器是颠倒安装的,因此要使轮子前进,值是相反的。
固件位置
所有IOIO固件版本均位于IOIO GitHub源中。在拉取(pull)主分支后,您可以在:ioio-master/release/firmware/application找到固件(*
.ioioapp)
Qualcomm 开发者专区是 Qualcomm 联合CSDN 共同打造的面向中国开发者的技术专区。致力于通过提供全球最新资讯和最多元的技术资源及支持,为开发者们打造全面一流的开发环境。本专区将以嵌入式、物联网、游戏开发、Qualcomm® 骁龙™处理器的软件优化等技术为核心,打造全面的开发者技术服务社区,为下一代高性能体验和设计带来更多的想法和灵感。
加入 Qualcomm 开发者专区高通 AI Hub
全新高通 AI Hub 包含预优化AI模型库,支持在搭载骁龙和高通平台的终端上进行无缝部署。
该模型库为开发者提供超过75个主流的AI和生成式AI模型,比如Whisper、ControlNet、Stable Diffusion和Baichuan-7B,可在不同执行环境(runtime)中打包,能够在不同形态终端中实现卓越的终端侧AI性能、降低内存占用并提升能效。所有模型均经过优化,以充分利用高通AI引擎内所有核心(NPU、CPU和GPU)的硬件加速能力,从而使推理速度提升4倍。
Qualcomm 活动 更多
SDK 下载
本版块下载 SDK,只需简单注册,就可轻松下载。